Clustering new data points¶
PLSCAN provides HDBSCAN*-style approximate prediction for unseen feature vectors via fast_plscan.prediction.approximate_predict.
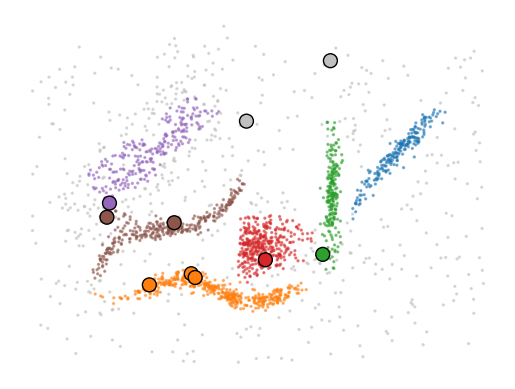
Given a fitted PLSCAN model and new points, approximate prediction:
Uses the neighbor tree built during
fit(no tree rebuild).Connects each new point through mutual reachability distance.
Returns an approximate cluster label and probability in
[0, 1].
[6]:
import numpy as np
import matplotlib as mpl
import matplotlib.pyplot as plt
from fast_plscan import PLSCAN
from fast_plscan.prediction import approximate_predict
[9]:
X = np.load("data/clusterable/sources/clusterable_data.npy").astype(np.float32)
clusterer = PLSCAN(min_samples=5).fit(X)
rng = np.random.Generator(np.random.PCG64(40))
X_new = X[rng.choice(X.shape[0], 10, replace=False)] + 0.015
labels, probabilities = approximate_predict(clusterer, X_new)
colors = [mpl.colors.to_rgb("silver"), *plt.get_cmap("tab10").colors]
cmap = mpl.colors.ListedColormap(colors)
plt.scatter(*X.T, c=clusterer.labels_, cmap=cmap, s=2, alpha=0.5, vmax=9)
plt.scatter(*X_new.T, c=labels, cmap=cmap, s=100, edgecolor="k", vmax=9)
plt.axis("off")
plt.show()